UTMとATC (航空交通管理) の現状と将来の展望 ATCの話1
2024年9月27日
2025年3月13日
UTM(無人航空機システム交通管理)とATC(Air Traffic Control 航空交通管理)
UTM と ATC の関係性について、現状と将来の展望
現在、UTMとATCは主に異なる役割と運用空域を持っています。UTMは低高度を飛行する無人航空機(ドローン)の管理を担当し、国によって違いはありますが、一般的に400フィート(約120メートル)以下程度の低いの空域を対象としています。一方、ATCは有人航空機の管理を担当し、主に高高度空域と空港周辺を管理しています。現時点では、これら二つのシステム間の情報共有は限定的であり、UTMに関する規制はまだ発展途上で、国や地域によって異なる状況です。
現在、UTMとATCは主に異なる役割と運用空域を持っています。UTMは低高度を飛行する無人航空機(ドローン)の管理を担当し、国によって違いはありますが、一般的に400フィート(約120メートル)以下程度の低いの空域を対象としています。一方、ATCは有人航空機の管理を担当し、主に高高度空域と空港周辺を管理しています。現時点では、これら二つのシステム間の情報共有は限定的であり、UTMに関する規制はまだ発展途上で、国や地域によって異なる状況です。
将来的には、UTMとATCの関係性に大きな変化が予想されます。両システムの統合が進み、シームレスな空域管理が実現する可能性もありえるのではないでしょうか。AIや機械学習の発展により、両システムでより高度な自動化が進むとも考えられます。また、ドローンだけでなく空飛ぶクルマなどの新しい航空機の登場により、現在の空域の定義を見直し、再構築する必要が出てくるでしょう。
さらに、国際的な基準の確立により、UTMとATCの規制がより調和していくことが期待されます。これらの変化は、航空安全の向上と効率的な空域利用を目指して進められていくと考えられます。
このような事から改めてATCを知ることはUTMを考える上でも重要だと思いますのでATCに関連する 航空管制レーダーやATCトランスポンダー、ADS-Bなどについて詳しくまとめます。ATC(航空交通管理:Air Traffic Control)とは、
現代の空は多くの航空機で混雑しているため、交通整理が必要です。航空交通管制機関が、航空機の位置、高度、速度、ルートを管理しています。この管制システムは、安全で効率的な航空輸送に不可欠です。
世界の主要空港では、年間1500万回以上の離着陸が行われています。さらに、大空港の周辺には小規模な空港も多くあります。このような複雑な交通システムを24時間体制で管理するのが、航空交通管制官の役割です。
管制官は高度な訓練を受け、定期的に再教育や評価を受けています。彼らの業務は多岐にわたり、パイロットは管制許可を要請した時点から、タキシング、離陸、巡航、到着、着陸、駐機場までのタキシングというそれぞれの段階で、何人もの異なる管制官と交信します。空港の高いタワー(管制塔)で直接、目視で行われる管制業務がこれらのフェーズです。
管制官は高度な訓練を受け、定期的に再教育や評価を受けています。彼らの業務は多岐にわたり、パイロットは管制許可を要請した時点から、タキシング、離陸、巡航、到着、着陸、駐機場までのタキシングというそれぞれの段階で、何人もの異なる管制官と交信します。空港の高いタワー(管制塔)で直接、目視で行われる管制業務がこれらのフェーズです。
空港周辺以外では、空港からずっと離れた場所で管制レーダー画面をじっと見守られながら管制の指示を受け目的地の空港へ向けて誘導して行きます。
ASR (Airport Surveillance RADAR:空港監視レーダー)
ARSR (Air Route Surveillance RADAR:航空路監視レーダー)
ORSR (Oceanic Route Surveillance RADAR:洋上航空路監視レーダー)
ASRは、空港用で約60NM(約110Km)以内の空域にある航空機の位置を探知し、航空機の誘導、航空機相互間の間隔設定等レーダーを使用した管制業務に使用されています。
なお、ARSR/ORSRの覆域が不足している洋上空域にある航空機を監視するためのものでレーダーサイトから半径250NM(約460km)以内の空域にある航空機を探知することができます。
ARSR/ORSRのようなレーダーは電波を用いて航空機の位置を検出する他、信号の送受信を行うことにより、高度や識別番号などの情報を取得します。
これらの取得した情報は、専用通信ネットワークによりレーダー施設から航空交通管制部へと伝送され、管制官はこの情報を用いて、航空機の誘導及び航空機相互間の間隔設定等の航空路管制業務を行っています。
具体的には、パイロットが管制許可を要請してから、タキシング(滑走路までの移動)、離陸、巡航、到着、着陸、そして駐機場へのタキシングという各段階で、異なる管制官と交信しながら飛行を行います。空港の高い管制塔(タワー)からの目視による管制は、主に空港周辺の運用が対象となります。一方、空港から離れた空域では、管制レーダー画面を通じて遠隔で航空機を監視し、目的地までの経路を誘導します。
具体的には、パイロットが管制許可を要請してから、タキシング(滑走路までの移動)、離陸、巡航、到着、着陸、そして駐機場へのタキシングという各段階で、異なる管制官と交信しながら飛行を行います。空港の高い管制塔(タワー)からの目視による管制は、主に空港周辺の運用が対象となります。一方、空港から離れた空域では、管制レーダー画面を通じて遠隔で航空機を監視し、目的地までの経路を誘導します。
航空管制業務とは
航空管制業務は、航空交通の安全を図り、その秩序を整えることを目的としています。具体的には、以下の3つの役割を果たします。
- 航空機相互間の衝突防止
- 飛行場及びその付近における航空機と障害物との衝突防止
- 航空機の秩序ある流れの促進とその維持
これらの業務は、航空管制官が航空機のパイロットに対して指示や承認を発出することで行われます。航空法第96条第1項では、航空機は航空交通管制区または航空交通管制圏において、国土交通大臣が与える指示に従って航行しなければならないと規定されています。この国土交通大臣の指示を実際に行うのが航空管制官です。
航空管制業務の流れ
計器飛行方式(IFR)で飛行する航空機の運航の流れを航空機のパイロットの立場から見てみます。
- 出発時:
- 航空管制官から管制承認を受けます。
- 地上走行の許可を受けて誘導路への移動を開始します。
- 滑走路端で離陸許可を受け、滑走路に入って離陸します。 - 上昇時:
- 空港ごとに定められた出発方式が航空管制官に指示されます。
- 指示に従って上昇し、巡航高度に達します。 - 巡航時:
- 指示された航空路上を目的地の空港に向かって飛行します。 - 降下時:
- 目的空港が近づくと、航空管制官の指示で降下を始めます。
- 所定の進入方式により降下を続けます。 - 着陸時:
- 着陸許可を得て、指示された滑走路に着陸します。 - 着陸後:
- 管制塔からの指示通りの誘導路を走行します。
- 指示された駐機場に入って飛行を終えます。
このように、計器飛行方式により飛行する航空機は、常に航空管制官の指示に従って飛行しています。出発、巡航、到着といった飛行のそれぞれの段階で、異なる種類の管制業務を受けています。
航空管制業務の種類
航空管制業務には、以下の5種類があります。
- 航空路管制業務:
対象:空港周辺の空域を除く空域を飛行する全ての計器飛行方式航空機
内容:飛行経路、高度、特定地点の通過時刻等を指定し、航空機の位置を把握して安全間隔を設定 - 進入管制業務:
対象:空港周辺の一定の空域を計器飛行方式で離陸後の上昇、または着陸のための降下を行う航空機
内容:安全な離着陸のための誘導 - ターミナル・レーダー管制業務:
対象:進入管制業務の対象となる航空機
内容:レーダーを用いた管制 - 飛行場管制業務:
対象:航空交通管制圏内で空港に離着陸する航空機、または空港周辺を飛行する航空機
内容:空港周辺の安全確保 - 着陸誘導管制業務:
対象:着陸する航空機で主に最終進入経路上にあるもの
内容:レーダーを用いた誘導
管制機関の種類
これらの業務を行う管制機関は、大きく2種類に分けられます。
- 管制区管制所(ACC:Area Control Center):
業務内容:航空路管制業務及び進入管制業務(ターミナル管制機関に委任されている場合を除く)
設置場所:東京ACC、福岡ACC、神戸ACC の3ヶ所の航空交通管制部 - ターミナル管制機関:
業務内容:飛行場管制業務、進入管制業務、ターミナル・レーダー管制業務、着陸誘導管制業務のいずれか、または全部
設置場所:空港
以上のように、航空管制業務は複数の種類と段階に分かれており、それぞれの専門の管制官が連携して航空機の安全な運航を支えています。この複雑なシステムにより、日々多くの航空機が安全に飛行できています。

空港監視レーダー塔の二次監視レーダー(上)と一次監視レーダー(下)
Airport Surveillance Radar Tower Secondary Surveillance Radar (top) and Primary Surveillance Radar (bottom)
Project Kei, CC BY-SA 4.0 , via Wikimedia Commons 説明オーバーラップ加工
航空監視と通信システム
航空監視システムは独立監視方式と従属監視方式の2つに大別されます。独立監視方式は、監視側が情報を直接測定するもので、さらに非協調監視方式(航空機側の装置に依存しない)と協調監視方式(航空機側の装置が関与する)に分かれます。主要な監視手段には一次監視レーダー(PSR)や二次監視レーダー(SSR)などがあります。
一方、従属監視方式は、航空機側が測定した情報をデータリンクを通じて地上に伝送する方式で、ADS-BやADS-Cがその代表例です。特にADS-Bは、航空機が自身の位置や速度などの情報を送信するシステムであり、従来のレーダーに比べて高精度であるため、次世代の航空交通管理の主要な監視方式として期待されています。
航空監視と通信システム
航空監視システムは独立監視方式と従属監視方式の2つに大別されます。独立監視方式は、監視側が情報を直接測定するもので、さらに非協調監視方式(航空機側の装置に依存しない)と協調監視方式(航空機側の装置が関与する)に分かれます。主要な監視手段には一次監視レーダー(PSR)や二次監視レーダー(SSR)などがあります。
一方、従属監視方式は、航空機側が測定した情報をデータリンクを通じて地上に伝送する方式で、ADS-BやADS-Cがその代表例です。特にADS-Bは、航空機が自身の位置や速度などの情報を送信するシステムであり、従来のレーダーに比べて高精度であるため、次世代の航空交通管理の主要な監視方式として期待されています。
航空管制におけるレーダーとトランスポンダーの役割と発展
レーダーやトランスポンダーは、航空管制に不可欠な装置です。
航空管制レーダーには一次監視レーダー(PSR)と、二次監視レーダー(SSR)があり、トランスポンダーは主に二次監視レーダーと連携して機能します。一次監視レーダーは電波を発射し、物体からの反射波を受信することで物体の存在のみを検知します。一方、二次監視レーダーは質問電波を発射し、トランスポンダーからの応答電波を受信することで飛行機の詳細情報を取得します。トランスポンダーは、二次監視レーダーからの質問電波に対して自動的に応答し、飛行機の情報を送信します。
航空管制レーダーには一次監視レーダー(PSR)と、二次監視レーダー(SSR)があり、トランスポンダーは主に二次監視レーダーと連携して機能します。一次監視レーダーは電波を発射し、物体からの反射波を受信することで物体の存在のみを検知します。一方、二次監視レーダーは質問電波を発射し、トランスポンダーからの応答電波を受信することで飛行機の詳細情報を取得します。トランスポンダーは、二次監視レーダーからの質問電波に対して自動的に応答し、飛行機の情報を送信します。
空港監視レーダー(ASR : Airport Surveillance Radar)や航空路監視レーダー(ARSR : Air Route Surveillance Radar)で使用されている一次監視レーダー(PSR)では、レーダースコープ上に機影が現われて航空機の位置は確認できますが、レーダースコープ上に複数の機影が現われると管制官はどれが管制の対象機であるかを識別するため、対象機に対して無線で旋回飛行を指示して、その指示に従って動いた機影を見つけて識別していました。しかし、空の交通量が多くなるとそれが困難になるため、第二次世界大戦にアメリカ軍が開発した敵味方識別装置 (IFF) Mark Xの選択的識別機能 (SIF : Selective Identification Feature ) のモード3を民間航空が利用して航空機の識別を容易にする方法がICAOで採択され、1957年にインタロゲータ(質問機)と呼ばれる地上機が電波で質問パルスを発射して、航空機に搭載された応答機が質問パルスを受信して、それに自動的に対応してあらかじめセットされている応答符号を応答パルスとして電波で発射する、二次監視レーダー (SSR)と呼ぶ標準方式が定まりました。
航空交通管制 (ATC) は、二次監視レーダー (SSR) システムを使用して飛行中の航空機を識別しています。このために航空機側に搭載する応答装置(応答機)をATCトランスポンダ(ATC Transponder、ATC XPDR、航空交通管制用自動応答装置) といいます。

平成23年版 交通安全白書 内閣府より
航空路監視レーダーの配置

国土交通省那覇航空交通管制部 八重岳航空路監視レーダー局
画像サイト「沖縄発!役に立たない写真集」, Public domain, via Wikimedia Commons
航空路監視レーダーの配置

国土交通省那覇航空交通管制部 八重岳航空路監視レーダー局
画像サイト「沖縄発!役に立たない写真集」, Public domain, via Wikimedia Commons
トランスポンダーには主に3つのモードがあります。モードAは飛行機の識別コード(スコークコード)を返信します。これは管制官から指定された4桁の数字を使用します。モードCは飛行機の現在の高度情報を返信し、垂直方向の間隔確保に重要な役割を果たします。モードSは特定の飛行機にのみ情報を要求できる機能で、各機体に固有のアドレスを割り当てています。これらのモードにより、管制官は飛行機の位置、高度、識別情報を正確に把握できます。
近年、トランスポンダーの発展型としてADS-B(放送型自動従属監視機能)が注目されています。ADS-Bは、飛行機がGPSなどを使用して自らの位置情報を発信し、より精密な航空管制を可能にします。また、飛行機同士の直接的な情報交換も可能になります。ADS-Bには、自機の情報を周囲に自動発信するADS-B OUTと、他機が発信したADS-B情報を受信し、コックピット内に表示するADS-B INの2つの主要機能があります。
ADS-Bの利点として、飛行機同士による間隔確保の可能性や、より効率的な航空管制の実現、一般向けサービス(フライトレーダー24など)への活用が挙げられます。しかし、ADS-Bはまだ発展途上のシステムで、普及が進行中です。日本国内では必須装備となっていませんが、欧州など一部地域では装備要件があります。全体的にはまだ試験的な運用段階にあります。
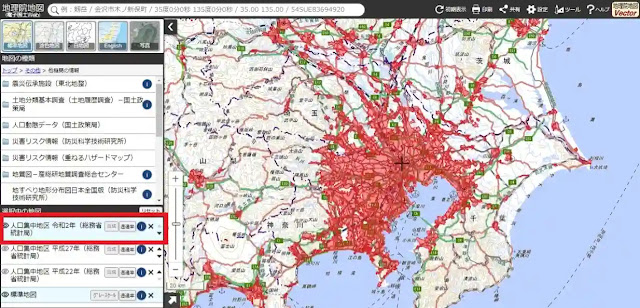
「フライトレーダー24」などの、ADS-Bの情報を活用した一般向けWEBサービスでは、世界中のユーザーが受信したADS-B情報を集約し、一般の人でもADS-Bを搭載した航空機の位置をリアルタイムで確認できるようにしています。これは航空管制のイメージを掴むのに役立ちますが、ADS-B非装備の機体は表示されないため、全ての飛行機を網羅しているわけではありません。
「フライトレーダー24(Flightradar24)」については
「GPSジャミングマップ(GPS jamming map) 現在のジャミングを地図上に表示」のなかでADS-Bフライト追跡リアルタイム表示サービスとして詳しく説明しています
トランスポンダーとその発展型であるADS-Bは、現在の航空管制システムの基盤となっており、飛行の安全性と効率性を高めるのに重要な役割を果たしています。将来的には、ADS-Bを活用したさらに高度な航空交通管理システムの実現が期待されています。これにより、航空機同士の直接的な情報交換や、より柔軟な飛行経路の設定が可能になるかもしれません。
しかし、新しいシステムの導入には時間がかかるため、当面は従来のトランスポンダーとADS-Bが併用されると考えられます。航空業界は、これらの技術を活用しつつ、さらなる安全性と効率性の向上を目指して進化を続けています。
ATCトランスポンダー (ATC Transponder)
航空交通管制用自動応答装置のことです。トランスポンダー(Transponder)は、TRANSmitter(送信機)とresPONDER(応答機)からの合成語で、時にXPDR、XPNDR、TPDR、TPと省略される場合もあります。受信した電気信号を中継送信したり、電気信号と光信号を相互に変換したり、受信信号に何の応答を返す機器の総称です。
二次監視レーダー(SSR : secondary surveillance rader 二次レーダーともいいます)による航空交通管制(ATC)が行われている空域を飛行中の航空機が、レーダーの地上装置からの質問電波を受信すると、管制に必要な自機の識別や飛行高度などの応答信号を自動的に送り返す機上の装置です。
トランスポンダーは、当初、軍用機の識別を目的に使用されました。軍用レーダーから照射された際に、コード化された信号を送信することで、味方機かどうかを識別できました。これがIFF(自機識別装置)と呼ばれるものです。
二次監視レーダーからの周波数1030メガヘルツのモードパルス(質問信号)を、機体下部の無指向性アンテナで受信したとき、あらかじめ選定したモードと一致すれば、1090メガヘルツのコードパルス(応答信号)を発信します。このコードパルスに、航空機の識別記号や飛行高度の情報、さらに無線通信機の故障やハイジャックの通報など非常用通信等の信号をのせ、地上のレーダースコープ上に表示することができます。

管制卓とレーダー表示画面

モードパルスには軍用、民間用をあわせて6種類あります。航空交通管制により指定された空域を飛行する場合は、ATCトランスポンダーを作動させ、管制官の指示に従い、モードおよびコードを選定しなければなりません。
1980年代以降はATCトランスポンダーの重要性が認識され、管制空域のうち指定された空域を飛行する場合は、航空機の飛行高度を応答する機能が義務づけられています。
法的要件
欧州委員会実施規則(EU)第1207/2011号 2011年11月22日
欧州単一空域における監視の性能と相互運用性に関する要件
laying down requirements for the performance and the interoperability of surveillance for the single European sky
では、EUにおいて計器飛行方式による一般航空交通運航を行う全ての飛行にモードSトランスポンダーの装備を義務付けています。
日本でも航空法第六十条、航空法施行規則第一四六条第二項により、
「管制区又は管制圏のうち、計器飛行方式又は有視界飛行方式の別に国土交通大臣が告示で指定する空域を当該空域の指定に係る飛行の方式により飛行する場合 四千九十六以上の応答符号を有し、かつ、モードAの質問電波又はモード三の質問電波に対して航空機の識別記号を応答する機能及びモードCの質問電波に対して航空機の高度を応答する機能を有する航空交通管制用自動応答装置 一」
全国の主要な空港の周辺で飛行場管制を行う航空交通管制圏や航空路を管制する航空交通管制区を飛行する場合はVHF無線機とATCトランスポンダの搭載が義務づけられています。ただし、トランスポンダーは、高度1万フィート(約3,000m)以上を飛行する場合や、主要空港(羽田空港、成田空港など)での離着陸時に搭載が必要です。ただし、有視界飛行方式の場合は、一部の例外を除いて搭載義務はありません。
「管制区又は管制圏のうち、計器飛行方式又は有視界飛行方式の別に国土交通大臣が告示で指定する空域を当該空域の指定に係る飛行の方式により飛行する場合 四千九十六以上の応答符号を有し、かつ、モードAの質問電波又はモード三の質問電波に対して航空機の識別記号を応答する機能及びモードCの質問電波に対して航空機の高度を応答する機能を有する航空交通管制用自動応答装置 一」
全国の主要な空港の周辺で飛行場管制を行う航空交通管制圏や航空路を管制する航空交通管制区を飛行する場合はVHF無線機とATCトランスポンダの搭載が義務づけられています。ただし、トランスポンダーは、高度1万フィート(約3,000m)以上を飛行する場合や、主要空港(羽田空港、成田空港など)での離着陸時に搭載が必要です。ただし、有視界飛行方式の場合は、一部の例外を除いて搭載義務はありません。
二次監視レーダー
二次監視レーダー(SSR)は、航空機の表面から受動的に電波を反射させて機能する「一次レーダー」と区別するために「二次」と呼ばれます。一次レーダーは、目標までの距離と方位をかなり高い精度で知ることができますが、近距離を除いて目標の高度(標高)を確実に知ることはできません。SSRは、アクティブなトランスポンダー(ビーコン)を使用して、二次レーダーからの問い合わせに応答を送信します。この応答には、ほとんどの場合、航空機の気圧高度と4桁の8進識別子(スコーク)が含まれます。
航空管制ユニットは、航空機にトランスポンダーコードを割り当てる際に「スコーク」という数字4桁のコードを使用します。例えば、「スコーク7421」というようにです。したがって、スコークは「トランスポンダーコードを選択せよ」を意味し、「スコーキングxxxx」は「トランスポンダーコードxxxxを選択しました」を意味すると言えます。
トランスポンダーのセット
パイロットは、航空管制官から無線を通じて「JA〇〇〇〇、スコーク0363」のようなフレーズで特定のコードをスコークするよう要請されることがあります。パイロットはその後、トランスポンダーで0363のコードを選択し、航空管制官のレーダー画面上のトラックが正しくその識別情報と関連付けられるようになります。
一次レーダーは一般的に方位と距離の位置情報を提供しますが、高度情報が不足しているため、モードCとモードSのトランスポンダーは気圧高度も報告します。モードCの高度情報は通常、パイロットの高度計から得られ、ギルハムコードと呼ばれる修正されたグレイコードを使用して送信されます。パイロットの高度計に適切な高度エンコーダーが含まれていない場合、ブラインドエンコーダー(高度を直接表示しない)がトランスポンダーに接続されます。混雑した空域の周辺では、すべての航空機に高度報告機能を持つモードCまたはモードSトランスポンダーを装備することが規制要件となっていることがよくあります。アメリカ合衆国では、これはモードCベールとして知られています。モードSトランスポンダーはモードC信号の送信と互換性があり、25フィート単位で報告する能力があります。GPSレシーバーから情報を受け取り、位置と速度も送信します。気圧高度の報告がなければ、航空管制官は正確な高度情報の表示を持たず、パイロットが無線で報告する高度に頼らざるを得ません。同様に、一部の航空機に搭載されている航空機衝突防止装置(TCAS)も、トランスポンダー信号によって提供される高度情報を必要とします。
トランスポンダーの作動方法
地上のSSRから1,030メガヘルツ(MHz) (=1.03GHz)帯の電波で送られた質問用信号を機上のATCトランスポンダが受信すると、1,090 MHz(=1.09GHz)帯の応答信号を十数個のパルスで返信します。この信号と一次レーダー映像を組み合わせることにより、管制官はレーダースクリーン上の輝点がどの航空機を表すか、その航空機が高度何フィートを飛行しているか、の情報を得ます。機上設備では離陸前までスタンバイ (standby, SBY) モードに設定し離陸開始直前に高度情報無しの「ON」または高度情報有りの「ALT」モードに設定することが義務付けられています。二次監視レーダーから質問波を受けてリプライの応答波を発信すると黄色のランプが点滅します。航空無線では「ピー、パー、ポー、プー」という音で復調されるのが聞こえます。
IDENT(アイデント)について
モードA、C、Sのすべてのトランスポンダーには「IDENT」スイッチがあり、これを作動させると20秒間だけ応答パルスにIDパルス特別な13番目のビット(IDENTと呼ばれる「識別 Identification」の略)が追加されます。地上のレーダー機器がこのIDENTビットを受信すると、レーダースコープ上で当該航空機の表示の輝度を上げた「強調表示」になり、確認しやすくなります。これは管制官がパイロットにident機能を要求することで、他の航空機の中から特定の航空機を見つけるためによく使用されます。例えば、「JA〇〇〇〇、スコーク0363でidentしてください」というようにです。
Identは、無線の故障が報告されたり疑われたりした場合にも使用されることがあります。これは故障が一方向だけなのか、パイロットがまだ送信または受信できるのか(両方ではない)を判断するためです。例えば、「JA〇〇〇〇、聞こえていたらスコークidentしてください」というようにです。
トランスポンダーコード(スコークコード)について
トランスポンダーコード(ATCコード)は、航空機識別のためにトランスポンダに設定する数値で、12ビットを8進法4桁で表現し、0000 - 7777の4096通りが設定できます。
航空機に搭載されてるトランスポンダーのダイヤルは0から7までの数字を4桁セットして使用します。このようなトランスポンダーは「4096コードトランスポンダー」と呼ばれることもあります。
二次監視レーダーの問い合わせ信号に応答して航空機のトランスポンダーが送信する4桁の数字で、航空管制官の交通分離を支援します。個別のトランスポンダーコード(スコークコード)は、飛行情報区域(FIR)内で航空機を一意に識別するために航空管制官によって割り当てられます。通常は航空管制官が指定して操縦者が装置へ入力します。これによりレーダー上で航空機を簡単に識別できます。
航空機に搭載されてるトランスポンダーのダイヤルは0から7までの数字を4桁セットして使用します。このようなトランスポンダーは「4096コードトランスポンダー」と呼ばれることもあります。
二次監視レーダーの問い合わせ信号に応答して航空機のトランスポンダーが送信する4桁の数字で、航空管制官の交通分離を支援します。個別のトランスポンダーコード(スコークコード)は、飛行情報区域(FIR)内で航空機を一意に識別するために航空管制官によって割り当てられます。通常は航空管制官が指定して操縦者が装置へ入力します。これによりレーダー上で航空機を簡単に識別できます。
「スコーク(squawk)」という言葉の使用は、このシステムが第二次世界大戦中の敵味方識別(IFF)システムに由来しています。IFFシステムは当初「オウム(パロット:Parrot)」というコードネームで呼ばれていたことから来ています。やがて航空機乗組員たちは、トランスポンダーに使用する識別用のコードを「鳥がギャーギャーと鳴く声」を表す「スコーク(squawk)」というニックネームを使うようになりました。オウム返しをする機械であるトランスポンダーの鳴き声(スコーク)という意味合いで呼ばれていたのでしょう。
航空管制によって割り当てられるコード
パイロットは状況が必要とするか許す場合、航空管制(ATC)の許可なしに一部のコードを選択することができます。これらのコードは英国では「顕著性コード」と呼ばれています。その他のコードは一般的にATC部門によって割り当てられます。計器飛行方式(IFR)の飛行では、スコークコードは通常、出発許可の一部として割り当てられ、飛行中ずっと同じままです。
有視界飛行方式(VFR)の飛行では、非管制空域にいる場合、「VFRをスコーク」します(米国とカナダでは1200、ヨーロッパでは7000)。ATC部門と連絡を取る際には、特定のコードをスコークするよう指示されます。周波数を変更する場合、例えばVFR飛行が管制空域を離れたり別のATC部門に変更したりする場合、VFR飛行は再び「VFRをスコーク」するよう指示されます。
割り当てられたスコークコードの混乱を避けるため、ATC部門には通常、近隣のATC部門のブロックと重複しないスコークコードのブロックが割り当てられ、自由に割り当てることができます。
すべてのATC部門が航空機の識別にレーダーを使用するわけではありませんが、それでもスコークコードを割り当てます。例えば、英国の下半分をカバーする飛行情報サービス局であるロンドン・インフォメーションは、レーダー画像にアクセスできませんが、飛行情報サービス(FIS)を受ける全航空機にスコークコード1177を割り当てています。これにより、他のレーダー装備のATC部門は、特定の航空機がロンドン・インフォメーションの無線周波数を聞いていることがわかり、必要に応じてその航空機に連絡することができます。
FAAのOrder JO 7110.65
スコーク [Squawk]
航空機識別のためにトランスポンダに設定する数値を、ATCコードあるいはスコークといいます。12ビットを8進法4桁で表現し、0000 - 7777の4096通りが設定できます。通常は航空管制官が指定して操縦者が装置へ入力します。特別な状況下のコードもあり、いくつかを例示します。
1200 有視界飛行方式 (VFR) により高度10,000フィート未満を飛行するとき
1400 有視界飛行方式 (VFR) により高度10,000フィート以上を飛行するとき
2000 コードの指示を受けていない航空機が、計器飛行方式 (IFR) でレーダー管制空域外からレーダー管制空域へ入る場合、二次レーダーへ返信に用います。
3333 整備用
4444 整備用
5555 整備用
7500 ハイジャック
7600 通信機故障(NORDO = NO RADIOとも呼ばれます)
7700 (ハイジャック以外の全ての)緊急事態
7777 (欧米)軍用機用コード。スクランブル発進した戦闘機が使用します。
スコークコード[squawk](トランスポンダーコード)一覧
以下の一覧は、様々な国で特定の目的に使用されてきた特定の航空用トランスポンダーコード(スコークコード)と、コードの範囲を示しています。従来、各国は独自の方式でコードを割り当てており、国境を越えた共通性はほとんどありません。
通常、パイロットは航空交通管制から割り当てられたコードを、その特定のフライトに適用することが求められます。時には、国によって割り当てられたコードがない場合に使用する一般的なコードを指定することがあります。そのような一般的なコードは、その国の航空情報マニュアル(AIM)または航空路誌(AIP)に明記されています。また、国際民間航空機関(ICAO)によって定義された特定の状況のための標準トランスポンダーコード(スコークコード)も存在します(以下ではICAOと表記)。
航空機ハイジャック、無線通信機故障、またはその他の緊急事態などの緊急時にのみ使用されるトランスポンダーコードも存在します。
| コード | 国 | 割り当て用途 |
|---|---|---|
| 0000 | ヨーロッパ | 非特定モードAコード; 使用禁止 |
| イギリス | モードCまたはその他のSSR故障 | |
| アメリカ | 割り当てられるべきではない 軍事迎撃コード Enroute Safety and Operations Support によって割り当てられた内部 ARTCC サブセット。(xx00 はすべての特定コードが割り当てられた後に非特定コードとして使用されます) | |
| 0021 | ドイツ | 5,000フィート(1,500メートル)以下の空域でのVFRスウォークコード(2007年3月15日以前は、VFRトラフィック用の国際的な7000コードに置き換えられる前のコード) |
| 0022 | ドイツ | 5,000フィート(1,500メートル)以上の空域でのVFRスウォークコード(2007年3月15日以前は、VFRトラフィック用の国際的な7000コードに置き換えられる前のコード) |
| 0025 | ドイツ | パラシュート降下中 |
| 0033 | イギリス | パラシュート降下中 |
| 0041–0057 | ベルギー | フライト情報サービス(BXL FIC)下のVFR交通に割り当てられる |
| 0100 | オーストラリア | 航空機が空港で運航中(ATCから指示されたり、航路補足情報に記載されているコード1200、2000、または3000の代わりに使用されます) |
| 0100–0400 | アメリカ | サービスエリア運用に割り当てられ、ターミナル/CERAP/産業/特殊目的/実験的活動のために割り当てられるサービスエリア運用用 |
| 0100–0700 | アメリカ | FAAのOrder JO 7110.65, 5-2に従った非順次コードの割り当て 別のコードがATCによって割り当てられない限り、洋上空域での使用も可能 0500, 0600, 0700 米国 外部ARTCCサブセット(すべての分離コードが割り当てられた後にxx00が非分離コードとして使用される以外は、分離コードのブロックである) |
| 0500, 0600, 0700 | アメリカ | 外部ARTCCサブセット。(すべての特定コードが割り当てられた後、xx00 は非特定コードとして使用されます) |
| 1000 | カナダ | 18,000フィートASL未満でのIFR飛行で、他のコードが割り当てられていない場合 |
| ICAO | モードSレーダー/ADS-B環境で使用される非特定モードAコードで、航空機の識別がフライトプランと照合される代わりにモードAコードが使用されます | |
| アメリカ | ADS-B航空機専用で、モード3A送信を抑制します FAAのOrder JO 7110.65, 5-2に従った非順次コードの割り当て。また、別のコードがATCによって割り当てられない限り、洋上空域での使用も可能です 外部ARTCCサブセット。(すべての特定コードが割り当てられた後、xx00 は非特定コードとして使用されます) | |
| 1100 | アメリカ | FAAのOrder JO 7110.65, 5-2に従った非順次コードの割り当て。また、別のコードがATCによって割り当てられない限り、洋上空域での使用も可能です 外部ARTCCサブセット。(すべての特定コードが割り当てられた後、xx00 は非特定コードとして使用されます) |
| 1200 | オーストラリア | クラスEまたはG空域での民間VFR飛行 |
| カナダ、アメリカ | 北米空域で、他に割り当てられたまたは適用されるコードがない場合のVFR飛行標準スコード | |
| 1201 | アメリカ | LAXの近くでVFR航空機が使用するために FAR 93.95 により割り当てられた (ATCと連絡がないグライダー操作、2012年2月まで) |
| 1202 | アメリカ | ATCと連絡がないグライダー操作; 2012年2月から有効 |
| カナダ | ATCと連絡がないグライダー操作; 2017年2月から有効 | |
| 1203–1272 | アメリカ | 特定1200シリーズコード、その他の割り当てがない限り(例: 1255)、DVFR航空機用で、フライトサービスステーションによってのみ割り当てられます |
| 1255 | アメリカ | 指定された消防活動エリアへの出入り中でATC施設と連絡がない航空機 |
| 1273–1275 | アメリカ | キャリブレーションパフォーマンスモニタリング機器(CPME)「パロット」トランスポンダー |
| 1276 | アメリカ | ATCまたは航空施設と通信が確立できない場合の空防識別区(ADIZ)侵入 |
| 1277 | アメリカ | 指定された捜索エリアへの出入り中で、USAおよびUSCGによって認可されたSARミッションを実施しているVFR航空機 |
| 1300 | アメリカ | FAAのOrder JO 7110.65, 5-2に従った非順次コードの割り当て。また、別のコードがATCによって割り当てられない限り、洋上空域での使用も可能です 外部ARTCCサブセット。(すべての特定コードが割り当てられた後、xx00 は非特定コードとして使用されます) |
| 1400 | カナダ | 18,000フィートASL以上のVFR飛行で、他のコードが割り当てられていない場合 |
| 日本 | 10,000フィートMSL以上のVFR飛行で、他のコードが割り当てられていない場合 | |
| アメリカ | 外部ARTCCサブセット(すべての特定コードが割り当てられた後、xx00 は非特定コードとして使用されます) | |
| 1500 | アメリカ | FAAのOrder JO 7110.65, 5-2に従った非順次コードの割り当て。また、別のコードがATCによって割り当てられない限り、洋上空域での使用も可能です 外部ARTCCサブセット(すべての特定コードが割り当てられた後、xx00 は非特定コードとして使用されます) |
| 1600, 1700 | アメリカ | 外部ARTCCサブセット。(すべての特定コードが割り当てられた後、xx00 は非特定コードとして使用されます) |
| 2000 | オーストラリア | クラスG空域での民間IFR飛行 |
| カナダ | 18,000フィートMSL以上での制御されていないIFR | |
| ICAO加盟国 | 非SSR空域からSSR空域に入るときに表示されるコードで、制御されていないIFR飛行スコードコードとして使用されます | |
| EASA加盟国 | コード設定に関するATSの指示がない場合にパイロットが設定するコード ただし、航空交通サービスを受けていない場合は除きます | |
| アメリカ | FAAのOrder JO 7110.65, 5-2に従った非順次コードの割り当て。また、別のコードがATCによって割り当てられない限り、洋上空域での使用も可能です 外部ARTCCサブセット。(すべての特定コードが割り当てられた後、xx00 は非特定コードとして使用されます) | |
| 2100 | オーストラリア | 航空機整備スタッフによる地上テスト |
| アメリカ | FAAのOrder JO 7110.65, 5-2に従った非順次コードの割り当て また、他のコードがATCによって割り当てられない限り、海洋空域でも使用されます 外部ARTCCサブセット。(すべての順次コードが割り当てられた後、xx00が非順次コードとして使用される順次コードのブロック) | |
| 2200,2300, 2400 | アメリカ | FAAのOrder JO 7110.65, 5-2に従った非順次コードの割り当て また、他のコードがATCによって割り当てられない限り、海洋空域でも使用されます 外部ARTCCサブセット。(すべての順次コードが割り当てられた後、xx00が非順次コードとして使用される順次コードのブロック) |
| 2500, 2600, 2700 | アメリカ | 外部ARTCCサブセット。(すべての順次コードが割り当てられた後、xx00が非順次コードとして使用される順次コードのブロック) |
| 3000 | オーストラリア | クラスA、C、およびDの空域での民間フライト、またはクラスEの空域でのIFRフライト |
| アメリカ | 外部ARTCCサブセット。(すべての順次コードが割り当てられた後、xx00が非順次コードとして使用される順次コードのブロック) | |
| 3100, 3200, 3300, 3400, 3500, 3600, 3700 | アメリカ | 外部ARTCCサブセット。(すべての順次コードが割り当てられた後、xx00が非順次コードとして使用される順次コードのブロック) |
| 4000 | オーストラリア | 特殊な操作やSARに関与していない民間フライトで、クラスG空域で15NM以上のオフショアで運航する場合 |
| アメリカ | VFR軍事訓練ルート上の航空機または頻繁または急速に高度変更を必要とする航空機 FAAのOrder JO 7110.65, 5-2に従った非順次コードの割り当て また、他のコードがATCによって割り当てられない限り、海洋空域でも使用されます 外部ARTCCサブセット。(すべての順次コードが割り当てられた後、xx00が非順次コードとして使用される順次コードのブロック) | |
| 4100 | アメリカ | 外部ARTCCサブセット。(すべての順次コードが割り当てられた後、xx00が非順次コードとして使用される順次コードのブロック) |
| 4200, 4300 | アメリカ | エンルート安全および運用サポートによって割り当てられた内部ARTCCサブセット。(すべての順次コードが割り当てられた後、xx00が非順次コードとして使用される順次コードのブロック) |
| 4400–4477 | アメリカ | SR-71、YF-12、U-2、B-57、圧力スーツフライト、およびFL600以上の航空機操作のために予約されています |
| 4401–4433 | アメリカ | FAAのOrder JO 7110.67(連邦法執行)に従って予約されています |
| 4434–4437 | アメリカ | 気象偵察、適切な場合 |
| 4440, 4441 | アメリカ | FL600以上の運用で、ロッキード/NASAがモフェットフィールドから使用します |
| 4442–4446 | アメリカ | FL600以上の運用で、ロッキードがエアフォースプラント42から使用します |
| 4447–4452 | アメリカ | FL600以上の運用で、SR-71/U-2がエドワーズAFBから使用します |
| 4453 | アメリカ | 高高度バルーン運用: テキサス州パレスタインの国立科学バルーン施設および国際的な運用を行っている他の提供者 |
| 4454–4465 | アメリカ | FAAのOrder 7610.4で指定されたFL600以上の空軍運用 |
| 4466–4477 | アメリカ | FAAのOrder 7610.4で指定されたFL600以上の民間運用 |
| 4600, 4700 | アメリカ | 外部ARTCCサブセット(すべての順次コードが割り当てられた後、xx00が非順次コードとして使用される順次コードのブロック) |
| 4800 | アメリカ | 外部ARTCCサブセット(すべての順次コードが割り当てられた後、xx00が非順次コードとして使用される順次コードのブロック) |
| 4900 | アメリカ | 外部ARTCCサブセット(すべての順次コードが割り当てられた後、xx00が非順次コードとして使用される順次コードのブロック) |
| 6000 | オーストラリア | クラスG空域での軍事フライト |
| アメリカ | 外部ARTCCサブセット(すべての順次コードが割り当てられた後、xx00が非順次コードとして使用される順次コードのブロック) | |
| 6100 | アメリカ、カナダ | NORADによって使用するために予約 |
| 6200, 6300 | アメリカ | 外部ARTCCサブセット(すべての順次コードが割り当てられた後、xx00が非順次コードとして使用される順次コードのブロック) |
| 6400 | アメリカ、カナダ | NORADによって使用するために予約 |
| 6500, 6600, 6700 | アメリカ | 外部ARTCCサブセット(すべての順次コードが割り当てられた後、xx00が非順次コードとして使用される順次コードのブロック) |
| 7000 | ICAO | 他のコードが割り当てられていない場合のVFR標準スウォークコード。 |
| EASA諸国 | 航空交通サービスを受けていないときにパイロットが設定すべきコード、別途規定がある場合を除く | |
| アメリカ | 外部ARTCCサブセット(すべての順次コードが割り当てられた後、xx00が非順次コードとして使用される順次コードのブロック。) | |
| オーストラリア | 無人航空機がすべてのクラスの空域で運用し、トランスポンダーを有効にするよう指示された場合 | |
| 7001 | フランス | 一部の国でVFRトラフィックを識別するために使用される |
| イギリス | 低高度運用からの急な軍事上昇 | |
| 7004 | イギリス | 一部の国でのアクロバットおよび展示コード |
| 7100, 7200, 7300 | アメリカ | 外部ARTCCサブセット(すべての順次コードが割り当てられた後、xx00が非順次コードとして使用される順次コードのブロック。) |
| スイス | スイスでのSAR(REGA)のための7100 | |
| 7400 | アメリカ、 イギリス、オーストラリア | 無人航空機のリンク喪失 |
| 7500 | ICAO | 航空機のハイジャック |
| 7501–7577 | アメリカ | コンチネンタルNORAD地域(CONR)によって使用するために予約 |
| 7600 | ICAO | 無線故障(通信喪失) |
| 7601–7607 | アメリカ | FAAによる特別使用のために予約 |
| 7610–7676 | アメリカ | 外部ARTCCサブセット(順次コードのブロック) |
| 7615 | オーストラリア | 沿岸ゾーン監視に従事する民間フライト |
| 7700 | ICAO | 緊急時 |
| 7701–7707 | アメリカ | FAAによる特別使用のために予約 |
| 7710–7776 | アメリカ | 外部ARTCCサブセット(順次コードのブロック) |
| 7777 | アメリカ、 ドイツ、 イギリス、 ベルギー、 オランダ | 固定テストトランスポンダー(RABM)がレーダー局の正確性をチェックするために使用する非順次コード(BITE) |
| アメリカ | DODの迎撃機がアクティブな防空ミッション中で、FAA指令7610.4に従ってATCのクリアランスなしで運用する場合。 |
日本(福岡FIR)を飛行するIFR機に割り当てるスコークコード
福岡FIR内において管制官は、 IFR 機に対して通常次のいずれかのコー ドを指定する。は、IFR機に対して次の要領により二次レーダー個別コードが指定します。
ICAO ASIA AND PACIFIC REGIONS (APAC) AIR NAVIGATION PLAN Vol.IIのTable ATM II-APAC-2, SSR Codes Allocation Planに基づき、福岡 FIR に割り当てられたコードブロックから、 管制情報処理システムが各航空機に割り当てた個別コード(末尾2桁のいずれかが零ではない4桁のコード)を指定します。
福岡FIRに対して割り当てられたコードブロック
0401-0477 1701-1777 2001-2077 2101-2177 2201-2277 2301-2377 2401-2477
3101-3177 3201-3277 3301-3377 3401-3477 3601-3677 3701-3777
4601-4677 4701-4777 5501-5577 5601-5677 6001-6177 7001-7077 7301-7377
ただし、Table ATM II-APAC-2, SSR Codes Allocation Planに基づき個別コードを指定し、 かつ、当該個別コードを我が国のACCに通報するよう取り決めがなされている外国FIRからの入域機については、福岡FIR内においても当該個別コードがそのまま使用されます。

ATC Transponder mounted on the McDonnell Douglas DC 9.
Which was taken at the JAL Museum.
Rainmaker47, CC BY-SA 3.0, via Wikimedia Commons
旅客機DC-9のATCトランスポンダ

Cessna ARC RT-359A transponder and Bendix/King KY197 VHF communication radio mounted in the instrument panel of a 1970 model American Aviation AA-1 Yankee aircraft.
Ahunt at English Wikipedia, Public domain, via Wikimedia Commons
軽量2人乗り航空機、アメリカン AA-1シリーズの、トランスポンダ(コンソールの中央)、スコーク「1200」に設定してあるのが確認できます。
ATCトランスポンダー(ATC transponder)
航空交通管制用自動応答装置で、二次監視レーダー(SSR : secondary surveillance rader、二次レーダーともいう)による航空交通管制(ATC)が行われている空域を飛行中の航空機が、レーダーの地上装置からの質問電波を受信すると、管制に必要な自機の識別や飛行高度などの応答信号を自動的に送り返す機上の装置です。二次監視レーダーからの周波数1030メガヘルツのモードパルス(質問信号)を、機体下部の無指向性アンテナで受信したとき、あらかじめ選定したモードと一致すれば、1090メガヘルツのコードパルス(応答信号)を発信します。このコードパルスに、航空機の識別記号や飛行高度の情報、さらに無線通信機の故障やハイジャックの通報など非常用通信等の信号をのせ、地上のレーダースコープ上に表示することができます。モードパルスには軍用、民間用をあわせて6種類あります。航空交通管制により指定された空域を飛行する場合は、ATCトランスポンダーを作動させ、管制官の支持に従い、モードおよびコードを選定しなければなりません。1980年代以降はATCトランスポンダーの重要性が認識され、管制空域のうち指定された空域を飛行する場合は、航空機の飛行高度を応答する機能が義務づけられています。
ATCトランスポンダのモード
航空トランスポンダーの問い合わせモードは、二次監視レーダー(SSR)や類似の自動位置情報伝送・監視システム(ADS-B)からのパルス列の標準フォーマットです。応答フォーマットは通常、トランスポンダーからの「コード」と呼ばれ、適切に装備された航空機から詳細な情報を得るために使用されます。
最も単純な形では、「モード」または、「問い合わせタイプ」は一般的に、2つ以上の問い合わせパルス間のパルス間隔によって決定されます。軍事用のモード1から5、民間用のモードA、B、C、D、そしてモードSなど、さまざまなモードが存在します。
航空トランスポンダーの問い合わせモード
航空トランスポンダー用に、いくつかの異なるRF通信プロトコルが標準化されています。
軍 用 :MODE - 1 , 2 , 3 , 4 , 5
民間用:MODE - A , B , C , D , S
ただし、MODE 3 とMODE A はパルス間隔が同一なので、MODE-3/Aと呼ばれ、軍民両用となっています。
| 軍 事 モード | 民 間 モード | 説 明 |
|---|---|---|
| 1 | 2桁の5ビットミッションコードを提供(コックピットで選択可能) Friendlyとして識別されるための基本警戒用コード | |
| 2 | 4桁の8進ユニットコードを提供(戦闘機用は地上で設定、輸送機は飛行中に変更可能) 機種・用途等を個別に送信するためのコード | |
| 3 | A | 航空機の4桁の8進識別コードを提供。コックピットで設定されますが、航空管制官によって割り当てられます。モード3/AはしばしばモードCと組み合わせて高度情報も提供します。 |
| C | 航空機の気圧高度を提供し、通常モード3/Aと組み合わせて4桁の8進コードと高度の組み合わせをモード3 A/Cとして提供します。しばしばモードAとCと呼ばれます。 | |
| 4 | 3パルスの応答を提供。遅延は暗号化された質問に基づきます。 高度に秘匿化された味方識別のためのコード。毎日NATOによって数値が設定される。 | |
| 5 | モードSとADS-B GPSポジションの暗号化保護版を提供します。 MODE4を更に発展させた味方識別のためのコード。GPSによる時間補正を行い、航空管制との干渉防止や性能の向上が行われた。 | |
| B | ヨーロッパにおける航空路管制用コード | |
| D | 将来技術用の予備コード | |
| S | 選択的な問い合わせに対して複数の情報フォーマットを提供します。各航空機には固定の24ビットアドレスが割り当てられます。 個別識別レーダー・ビーコン装置 | |
モードAとモードCは物理層として航空管制レーダービーコン システムを使用して実装されていますが、モードSは独立した下位互換性のあるプロトコルとして実装されています。ADS-Bは、トランスポート層としてモードS-ESまたはユニバーサルアクセストランシーバーを使用して動作することができます。
モード3/A (モードA)
トランスポンダーが問い合わせリクエストを受信すると、設定されたトランスポンダーコード(または「スコークコード」)をブロードキャストします。これは「モード3A」、あるいはより一般的に「モードA」と呼ばれます。「Ident」と呼ばれる別タイプの応答は、トランスポンダー操作パネルのボタンを押すことで航空機から開始できます。
モード3/C (モードCを伴うモードA)
モードAのトランスポンダーコード応答は、気圧高度応答によって補強することができ、これはモードC操作と呼ばれます。気圧高度は高度エンコーダーから得られ、これは航空機に搭載された独立した自己完結型ユニットか、トランスポンダーの不可欠な部分です。高度情報は、ギルハムコードと呼ばれる修正グレイコードの変形を使用してトランスポンダーに送られます。
モードAとCの応答は、航空管制官が特定の航空機の位置と高度をレーダー画面上で識別し、分離を維持するのに役立ちます。
飛行高度を示す情報を返信します。高度はQNEで100 ft単位です。地上局でQNHに変換され、海抜0メートルからの高度となります。Air Data Computer (ADC) を使っている機体:高度情報はADCからATCトランスポンダへ送られます。
旧式な高度計しか備えていない機体:高度情報は、通常のアナログ式高度計の後部に高度を符号化する装置の付いたエンコーディングアルティメータと呼ばれる高度計からATCトランスポンダへ送られます。エンコーディングアルティメータは、指針の表示高度を光学的にデジタル信号に変換してATCトランスポンダへ送ります。
モードS
モードSでは、トランスポンダーの過度の問い合わせ(混雑地域での多数のレーダー)を避け、自動衝突回避を可能にするように設計されています。モードSトランスポンダーは、モードAとモードCの二次監視レーダー(SSR)システムと互換性があります。これはTCASまたはACAS II(航空機衝突防止システム)機能に使用されるタイプのトランスポンダーで、ADS-Bシステムに参加する一つの手段である拡張スキッタブロードキャストを実装するために必要です。TCAS装備機はモードSトランスポンダーを持つ必要がありますが、すべてのモードSトランスポンダーがTCASを含むわけではありません。同様に、モードSトランスポンダーは1090ES拡張スキッタADS-B Outを実装するために必要です。モードSメッセージのフォーマットはICAO Doc 9688「モードS特定サービスマニュアル」に記載されています。
従来の二次監視レーダー (SSR) は、航空路および空港に設置され、航空交通管制業務の安全性と効率性に寄与してきましたが、今後の航空交通量の増大に伴いレーダターゲットの欠落等が発生することが危惧されたため、監視能力の拡大と通信の自動化を図ったものであり、個別識別レーダー・ビーコン装置と呼ばれています。旧来のATCトランスポンダ方式と互換性があり、ICAOの国際標準方式の新しいシステムです。
この方式は、モードSトランスポンダ応答機を装備している航空機に個別アドレスが与えられており、地上側のモードSトランスポンダ質問機が設置してある管制圏または管制区にいる飛行中の航空機に対して、モードSトランスポンダを装備している航空機を捕捉するために全機呼び質問を行い、全ての飛行中のモードSトランスポンダ応答機を装備している航空機の個別アドレス符号と高度情報が送られます。これにより地上側で航空機の位置・高度と個別アドレスが分かり、個別アドレス情報はコンピューターにファイルされます。その後、地上側のモードSトランスポンダ質問機に近い航空機から順番に、コンピューターにファイルされた個別アドレス情報を使用して個別の航空機に対して個別呼び質問を行い、個別呼びに応答した航空機の位置と高度を確認できます。また、一度個別呼びに応答したモードSトランスポンダ応答機は全機呼び質問には再度の応答をしないように応答停止がされますが、モードSトランスポンダ質問機が4回捜索する16秒間に自機に対して質問がされていない場合には、応答停止が解除され、すべての質問に対して応答するようになっています。これにより、目的とする航空機のみに個別アドレスを指定して質問ができるため、交通量の多い空域でも目標機を見つけやすいだけでなく、管制側と航空機間とでメッセージやデータ情報交換ができ、音声の通信量が少なくてすむなどの特徴があります。航空機衝突防止装置 (ACAS:Airborne Collision Avoidance System) にはモードSが利用されています。航空機衝突防止装置(ACAS)の運用には、問い合わせ側と対象機の両方にトランスポンダーが装備され、作動していることが必要です。ACASを搭載した航空機は、対象機のトランスポンダーの種類に応じて以下の情報を受信します。
今後の航空交通量の増大に対応するため、従来のSSRが持っている欠点を克服した新型SSRであるSSRモードSを航空路および主要空港に順次導入することになりました。SSRモードSレーダーは、航空機の位置情報を正確に監視することが可能であることに加え、信頼性の高いデータ通信機能を有しているため、航空機に搭載された空中衝突防止装置 (TCAS) が回避指示(RA)を出した場合は、その情報をデータ通信で管制側に送り、管制卓レーダー画面上にその航空機のRA情報を表示して航空管制官に知らせます。2003年(平成15年)11月20日から、山田航空路監視レーダーで日本における最初のSSRモードSを運用開始し、更に、いわき洋上航空路監視レーダー、三国山航空路監視レーダーと徐々にSSRモードS化されています。
交通量の多い主要空港では、モードSアドレスによって地上の航空機を識別する広域マルチラテレーションが導入されており、地上走行の監視・管制に利用されています。このため、マルチラテレーションシステムが導入されている空港では、地上移動時にもモードS装備機のトランスポンダ作動を義務付けています。
モードSでは、航空交通の増大に伴い、電波の相互干渉(ガーブル)、建物反射等によるレーダゴースト、同期しない応答の干渉(フルーツ)の発生が問題視され、監視能力の拡大を図り、ATCトランスポンダーの能力を発展させたもの。
- 地上のインタロゲータ(質問機)からの全機質問電波が発信される。
- 航空機搭載の MODE-Sトランスポンダーが、固有の個別アドレスと高度情報を発信する。
- 地上に航空機の位置・高度・個別アドレスが分かり、個別アドレス情報がコンピューターにファイルされる。
- 近い航空機から順番に、個別アドレス情報を使用して個々の航空機に個別に質問電波が発信される。
- 自機に受けた質問に対してのみ、航空機のトランスポンダーは応答を行い、データリンクも行われる。
モードAとモードSの比較
| 特徴 | MODE-A,C | MODE-S |
|---|---|---|
| コード数 | 12bit, 4096コード | 24bit, 16777216 |
| 精 度 | 方位:0.15度 距離:250m 高度:100ft単位 | 方位:0.06度 距離:100m 高度:25ft単位 |
| 電波干渉 | 比較的 大 | 比較的 小 |
| データリンク | 無し | 有り |
モードSの機能
質問を受けると、モードSトランスポンダーはSSRシステム、航空機搭載のTCAS受信機、ADS-B SSRシステムに対して航空機の情報を送信します。この情報には、航空機の呼び出し符号や航空機の永久的なICAO 24ビットアドレス(人間用インターフェースでは6つの16進数文字で表されます)が含まれます。モードSトランスポンダーの機能の1つは、下位互換性があることです。モードSトランスポンダーを搭載した航空機でも、モードAまたはC質問への応答を送ることができます。この機能は、インターモードと呼ばれる特定のタイプの質問シーケンスで有効化できます。
ICAO 24ビットアドレス
モードS装備機は、国内登録時に固有のICAO 24ビットアドレス(通称モードS「16進コード」)が割り当てられ、これが航空機の登録証明書の一部となります。通常、このアドレスは変更されませんが、トランスポンダーは再プログラム可能で、しばしば整備時や航空機の運航管理システムへの適切な入力変更により、別の機体へ移設されることがあります。
利用可能なICAO 24ビットアドレス(16進コード)は16,777,214 (224-2)個の固有のアドレスです。ICAO 24ビットアドレスは、16進数、8進数、2進数の3つのデジタル形式で表すことができます。これらのアドレスは、通常個々の航空機や登録に固有のIDとして割り当てられます。
航空機アドレス(ICAO 24ビットアドレス)の割当てについて、国土交通省航空局からサーキュラーが以下のように出ています。
「 件名:航空機アドレスの割当てについて 」
「 件名:航空機アドレスの割当てについて 」
航空機にSSRモードSトランスポンダまたは航空機衝突防止装置(TCAS-I)等(以下「モードSトランスポンダ等」という。)を装備する場合において、国際民間航空条約第10付属書で規定された基準にしたがって航空機アドレスを割当てる方法等を示すものである。
概 要
国際民間航空機関(ICAO)は、新しいSSR方式(モードS)について、1987年10月22日付けで国際民間航空条約第10付属書(ANNEX10)にその基準を規定した。本付属書では、航空機アドレスの割当てに関して、次の要件が規定されている。
(1)各航空機に個別のアドレスを割当てること。
(2)航空機アドレスは24ビットで構成すること。
(3)日本の国別アドレスは先頭6ビットを100001(8進数で41)とし、残りの18ビットは日本の航空機登録機関が任意に割当てることができる。
以上の要件に基づいて、各航空機に航空機アドレスを割当てる。
以上の要件に基づいて、各航空機に航空機アドレスを割当てる。
割当て方法
(1)我が国の国籍を有する航空機又は我が国の国籍を取得しようとする航空機にSSRモードSトランスポンダ装置等を装備する場合は、別添様式にしたがって航空機アドレスの割当てを申請するものとする。
(2)申請書の記載内容が適正と認められる場合には、航空機アドレスの割当てを受けることができる。
(3)割当てを受けた者は、8桁8進数で表された航空機アドレスを1桁毎に2進数に変換し、これに応じて機体側配線の改修等を行うものとする。
例えば、登録番号 JA381A の 全日空 の フラインホヌに割り当てられたICAO 24ビットアドレスは次の通りです。
ANA A380-841 JA381A FLYING HONU(ANAブルー)
HexCode(ICAOcode) 852A24
16 進数では 852A24
8 進数では 41225044
例
HexCode(ICAOcode) 852A24
16 進数では 852A24
8 進数では 41225044
2 進数では 100001010010101000100100
8桁8進数で表された航空機アドレスを1桁毎に2進数に変換し、これに応じて機体側配線の改修等を行う変換方法
8桁8進数で表された航空機アドレスを1桁毎に2進数に変換し、これに応じて機体側配線の改修等を行う変換方法
例
4 1 2 2 5 0 4 4
↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓
100 001 010 010 101 000 100 100 {8進数1桁毎に2進数に変換}
空白をいれると、計算しやすく、視覚的にも見えやすくなります。
1000 0101 0010 1010 0010 0100 {16進数の桁}
100 001 010 010 101 000 100 100 {8進数の桁}
100 001 010 010 101 000 100 100 {8進数の桁}
これらはすべて、異なる数値システムで表されたHexCode(ICAOcode) 852A24の24ビットアドレスです。
自動従属監視 (ADS)のテクノロジー
自動従属監視 (ADS : Automatic Dependent Surveillance)
自動従属監視 (ADS) は、航空機がデータ リンクを介して、航空機の識別、4 次元位置、および必要に応じて追加データを含む、機内ナビゲーション システムおよび位置測定システムから取得したデータを自動的に提供する監視技術です。(ICAO Doc 4444:PANS-ATM)
ADS データは、レーダー画面を再現した画面で管制官に表示されます。ICAO Doc 4444 PANS-ATM では、 関係する航空機の識別が明確に確立されている場合、航空交通管制サービスはADS の使用に基づいて行われる可能性があると規定されています。
現在、ADS には主に 2 つのバージョンが使用されています。
自動従属監視ブロードキャスト (ADS-B) は、航空機または水上車両の機能であり、他の航空機、車両、地上施設が使用できるように、位置、高度、ベクトルなどの情報をブロードキャストします。これは、ADS 原理の主な応用となっています。
自動従属監視契約 (ADS-C) は ADS-B と同様に機能しますが、データは ANSP と航空機間の明示的な契約に基づいて送信されます。この契約は、デマンド契約、定期契約、イベント契約、緊急契約のいずれかです。ADS-C は、交通量が比較的少ない大陸横断または大洋横断エリアでの ATS の提供に最もよく使用されます。
自動従属監視ブロードキャスト (ADS-B)
ICAO Doc 4444 PANS-ATM では、ADS-B を使用する場合の水平方向の最小間隔は、レーダーまたは 2 つの組み合わせを使用する場合と同じであると規定されています。
ADS-B (Automatic Dependent Surveillance-Broadcast) は、衛星信号と無線信号を使用して航空機の位置を特定し、そのデータをリアルタイムで共有します。この技術は、米国、カナダ、オーストラリア、インド、ヨーロッパの航空業界で長年広く使用されており、航空安全エコシステムにおいてますます重要な部分となっています。
ADS-B には 2 つの主要コンポーネントがあります。1 つ目は ADS-B Out で、従来の航空機にインストールして、飛行経路、速度、高度などの飛行情報をブロードキャストできます。2 つ目は ADS-B In で、ADS-B Out 送信機からブロードキャストされた情報を受信します。AirSense を搭載した DJI ドローンは ADS-B In のみを使用するため、追加の送信を追加して電波を混雑させることなく、近くの従来の航空機を見ることができます。
ADS-B
放送型 自動位置情報伝送監視機能(Automatic Dependent Surveillance – Broadcast)
航空機が自ら「識別コード、位置、速度、経路意図等」を一括送信するもの。受信の確認はしない。
航空機の航法装置の性能によって高精度かつ高信頼性の監視情報が送信されるが、信頼性や精度が完全に航空機に依存するため、機材不良時の精度の信頼性の確保が問題となる。
また、送受信機器が非常に安価にできるため、なんなら個人でもプログラムを組んで情報を受け取ることができる。
アメリカでは既に2020年1月から全航空機に対して ADS-B OUT の搭載が義務付けられました。日本では搭載が義務付けられていません。
ADS-B OUT , ADS-B IN
ADS-Bには、ADS-B OUT と ADS-B IN の異なるサービスが存在します。
ADS-B OUTが基本装備で、ADS-B INがオプションと考えるとよいです。
「ADS-B Out」は、今まで説明していた通り、各航空機が自ら「識別コード、位置、高度、速度などの自身に関する情報」を定期的に送信するものです。
ADS-B Outが提供する情報は、ほとんどの場合レーダーベースの情報よりも正確で、管制官は航空機の位置の把握と分離をよりタイミングよく行うことができるようになります。
「ADS-B IN」は、近くにいる他の航空機からのADS-B-OUTの情報に加え、地上から発信される、TIS-B(Traffic Information Service -Broadcast;放送型トラフィック情報サービス(地上の航空官署が把握した航空交通情報))及び、FIS-B(Flight Information Service -Broadcast;放送型飛行情報サービス(気象情報やフライトプラン、NOTAMなど安全運航に役立つ情報))のデータを受信し、コックピットに表示する機能のことです。
ADS-BはICAOが承認した航空監視技術の重要な部分であり、世界中で次第に国内空域に導入されています。例えば、米国の次世代航空交通管理システム(NextGen)、欧州の単一欧州空域ATMリサーチ(SESAR)、インドの航空システムブロックアップグレード(ASBU)などの一部となっています。オーストラリアの計器飛行方式(IFR)航空機にはADS-B装備が義務付けられており、米国でも2020年1月から多くの航空機(すべての商用旅客機やSSRトランスポンダーが必要な領域を飛行する機体)への装備が義務化されました。欧州でも2017年から一部の航空機へADS-B装備が義務付けられています。カナダでは2009年1月15日から、レーダーによる監視範囲外の遠隔地(ハドソン湾、ラブラドル海、デイヴィス海峡、バフィン湾、南グリーンランド周辺)でADS-Bによる監視を行っています。航空会社にはADS-B製品の米国および欧州基準との相互運用性を確保することが推奨されており、ADS-Bによる追跡が可能な場合、管制官はより良く燃費効率の高い飛行経路を提供できます。
説明
ADS-Bは、将来的に世界中の航空機管制の主要な監視方式としてレーダーに置き換わる可能性のある空域監視システムです。米国では、ADS-BはNextGenと呼ばれる航空インフラとオペレーションの更新・強化のための国家的な空域戦略の不可欠な要素となっています。
ADS-Bは、航空機の位置と速度データを毎秒送信することで、管制官や他のADS-B受信機能付き航空機に対し、リアルタイムで航空機を「見える化」し、安全性を高めます。その他のADS-Bデータの用途には、フライト後の解析、低コストの飛行追跡、計画、運航指示などがあります。
米国内では、「ADS-B In」システムを使えば、TIS-BおよびFIS-Bアプリケーションを通じて無料で管制交通情報や政府発行の図解気象情報を入手できます。
ADS-Bは「ADS-B Out」と「ADS-B In」の2つの異なる機能から構成されています。各「ADS-B Out」航空機は、搭載した送信機を使って自身の識別コード、現在位置、高度、速度などの情報を定期的に放送します。ADS-B Outにより、管制官は現行のレーダー方式よりも正確な航空機の実時間位置情報を得られるため、より的確なタイミングと精度で航空機の管理と分離ができます。
「ADS-B In」とは、他の航空機によるADS-B情報(つまり「ADS-B Out」)の受信と処理を指します。米国のADS-B Inには、FIS-BやTIS-Bのような管制地上局から送信されるその他のパイロット向け情報も含まれます。これらの地上局からの情報は、通常ADS-B Outを放送する航空機が近くにいる場合にのみ利用できます。
ADS-B Outシステムは、航空機に搭載された2つの avionic コンポーネントに依存しています。高い信頼性を備えた衛星航法源(GPS や他の認定済みGNSS受信機)と、データリンク(ADS-B装置)です。認定を受けたADS-Bデータリンクには複数の種類がありますが、最も一般的なのは1090MHzの変種モードSトランスポンダーか、978MHzのものです。FAA は、満足18,000フィート(5,500m)以下の高度でのみ運航する航空機に978MHzリンクの使用を求めており、これにより1090MHz帯域の混雑を緩和できます。1090MHzでADS-B Outを実現するには、新しいトランスポンダーを設置するか、メーカーがADS-B機能アップグレードを提供している場合は既存のトランスポンダーを改造します(認定済みGNSS位置源がまだ搭載されていない場合は、これも装備する必要があります)。
利点
ADS-Bは、飛行の安全性と効率性の両方を向上させる多くの利点を、パイロットと管制官の両方に提供します。
ADS-B Inシステムを使用すると、パイロットはADS-B Outを装備した周辺の航空機に関する交通情報(高度、方位、速度、距離など)を確認できます。ADS-B Out参加者からの位置情報を受信するだけでなく、米国では適切な地上装置とレーダーが存在する場合、TIS-Bを使ってADS-B Out未装備機の位置情報も取得できます。ADS-Rは、UATと1090MHz周波数帯域間でADS-B位置情報を再送信します。
ユニバーサルアクセストランシーバー(UAT) ADS-B Inテクノロジーを搭載した航空機は、気象レーダーを含む気象報告を受信できます。また米国内では、一時的な飛行制限(TFR)やNOTAMなどの読み取り可能な飛行情報もフライト情報サービス放送(FIS-B)を通じて受信できます。
ADS-B地上局は、航空機の分離と管制に使用される一次・二次レーダーシステムに比べ、設置と運用コストが大幅に安くなります。
現在一部の民間企業が提供している他の機内気象サービスとは異なり、米国ではADS-Bサービスやその各種利点を利用するための加入費用は不要です。航空機所有者は機器と設置費用を負担しますが、連邦航空局(FAA)がこの技術に関連するすべてのサービスの管理と放送に要する費用を負担します。
安全性
状況認識力の向上
ADS-Bは、パイロットに改善された状況認識力を提供することで、航空界全体の飛行をより安全なものにします。ADS-B In装備のコックピットでは、パイロットが機内飛行ディスプレイ上で他の交通機の動きを確認でき、明確で詳細な気象情報にもアクセスできます。また、一時的な飛行制限や滑走路閉鎖など、関連する最新情報を受け取ることもできます。
可視性の向上
ADS-B Outのみを装備した航空機も、管制官がより正確かつ確実に位置を監視できるようになるため恩恵を受けます。このシステムを使えば、パイロットと管制官が同じレーダー画面を見られます。周辺の空域でADS-B Inを使用する他の完全装備機は、ADS-B Out機と衝突するリスクを簡単に回避できます。過去のTCAS(気撃警報装置)のようなシステムでは、同じ技術を搭載した航空機しか見えませんでしたが、ADS-Bでは、ADS-B Outを装備した全機が、ADS-B In対応機に情報を送信するため表示されます。ADS-Bは、レーダーの
カバレッジ限界部でも優れた監視能力を発揮します。レーダーのような設置上の制約はありません。全範囲で精度が一定です。ADS-Bの両形態(1090ESおよび978MHz UAT)で、位置情報は1秒ごとに更新されます。978MHz UATは、単一の短時間送信で情報を提供します。1090ESシステムは、2種類の位置報告(偶数/奇数)をランダムに送信します。位置を明確に復号化するには、両種類の報告のうち1つ、または近くの基準位置が必要です。
ADS-Bは以下のことで安全性を向上させます。
非レーダー空域でのレーダーに匹敵するIFR分離
VFR飛行追跡範囲の拡大
最終進入と滑走路占有の管制、 地上での滑走路違反の減少
より正確な捜索・救難対応
「航空機の不時着」データを送信できますが、FAA は、ADS-B機器にブラックボックスのような耐衝撃性が求められていないため、 不時着時のADS-B の有効性を調査する意向がないと述べています。
他機の視認性向上
最終進入と滑走路占有のコックピット監視
VFRおよびMVFR条件下での視覚分離
すべての気象条件下でのVFR並みの分離
リアルタイムのコックピット気象表示
リアルタイムのコックピット空域表示
効率性
環境影響の軽減
ADS-B技術は航空機の位置をより正確に報告します。これにより、管制官は以前より狭い間隔で混雑空域への出入りを航空機に指示でき、クリアランスを待つ時間、ベクトリング時間、待機時間が短縮されます。これにより、汚染と燃料消費量の削減に既に好ましい影響を与えています。
交通容量の改善
ADS-Bにより、以下を通じて容量と効率性が向上します。
優れた管制交通流管理
合流と間隔調整
自己分離またはステーションキーピング
拡張視覚進入
近接した並列進入
最終進入での間隔縮小
航空機の分離間隔縮小
「自由航行」概念の段階的進化のための高高度空域での運用強化
下層視程障害時の地表運用
ほとんどの気象条件下での視程飛行気象状態(VMC)相当の容量を全空域で実現
非レーダー空域での改善された管制サービス
軌道ベースの運用により、最適な軌道で、降下パターンや待機パターンを必要とせずにゆるやかな上昇と降下が可能に。各航空機がNextGen機器を搭載すれば、すべての空地の関係者がシステム全体の情報管理ネットワークのノードとなり、ゲートフロムゲートの所要時間短縮、 滑走路利用能力向上、炭素排出量削減など、さまざまな利点が得られます。
ADS-BとCDTI(コックピットディスプレイ交通情報)の使用により、一定の空港で視覚進入運用が通常終了する際(例:天井高度がMVA+500フィートを下回る場合)の、悪視程時の運用容量を改善でき、進入間隔を狭められる可能性があります。
その他の用途
ADS-Bデータリンクは、さまざまな機上地上アプリケーションをサポートしています。各アプリケーションには、独自の運用コンセプト、アルゴリズム、手順、規格、ユーザー訓練があります。
コックピット交通情報表示 (CDTI)
コックピット交通情報表示(CDTI)は、他機の位置を含む監視情報をフライトクルーに提供する一般的な表示です。CDTIの交通情報は、ADS-B、TCAS、TIS-Bなど、1つまたは複数のソースから取得できます。ADS-Bメッセージの直接の機対機送信により、CDTIに近接航空機を表示できます。
ADS-B報告に基づく交通情報に加え、CDTIには現在の気象状況、地形、空域構造、障害物、詳細な空港マップ、その他特定の飛行フェーズに関連する情報も表示される可能性があります。
機上衝突防止
ADS-Bは、機上衝突防止システム(ACAS)の運用を強化する貴重な技術と見なされています。ADS-Bの組み込みにより、以下のような利点が期待できます。
高密度空域での有効範囲を広げるため、ACASが必要とするアクティブ質問の回数を減らす。
ADS-B状態ベクトル、機体意図、その他の情報を組み込むことで、 不要な警報率を低減する。
ACASディスプレイをCDTIとして使用し、交通機を確実に識別する。
対地高度1,000フィート以下での衝突防止、および滑走路抵触の検出。
最終的には、他機トランスポンダへのアクティブ質問を必要とすることなく、ADS-Bのみに基づいてACAS機能が提供される可能性がある。
以下の用途でも、ADS-Bの恩恵を受けられるかもしれません。
照明制御の自動化と運用
空港地上車両および航空機救難消防車両の運用ニーズ
高度維持性能の測定
一般航空運航管理
干渉管理
ATSの適合性監視
個人受信機を使った航空機スポッティング(仮想レーダー画像の作成)
ADS-B受信機のクラウドソースによる分散ネットワークを使って航空機を追跡するウェブサイトが複数あります。
セキュリティリスク
トランスポンダーのみを備えた航空機、または全くトランスポンダー機能がない航空機は表示されません。このシステムに慣れすぎたり、過度に自信を持ったりするパイロットは、自分自身だけでなく、トランスポンダーのみの航空機やADS-Bトランスポンダーを備えていないグライダー航空機にとっても安全上の問題となります。
グライダー航空機は、他のグライダー航空機との衝突回避のためにFLARMシステムを使用することが多いですが、このシステムはADS-Bと互換性がありません。したがって、ADS-B搭載だがFLARM非搭載の航空機は、FLARM搭載だがADS-B非搭載のグライダーにとってセキュリティリスクとなり、その逆もまた然りです。このため、グライダーの曳航に使用される航空機などは、FLARMとADS-Bの両方のトランスポンダーを搭載しています。
2012年、セキュリティ研究者がADS-Bメッセージが暗号化も認証もされていないため、スプーフィングされた偽のADS-Bメッセージによる妨害から防御できないと主張しました。FAA はこの指摘に対し、問題とリスクは認識していたが、その対策は機密扱いのため公開できないと回答しました。考えられる対策の1つは、マルチラテレーションを用いてメッセージが放送された位置が、メッセージに記載された位置の近くであることを検証することです。ここでは、受信メッセージのタイミングを比較して、アンテナから航空機までの距離を確認します。
標準におけるいかなる認証手段の欠如も、一次レーダーを使って受信データを検証することを義務付けています。ADS-Bメッセージの内容が暗号化されていないため、誰でも読むことができます。
運用理論
ADS-Bシステムには3つの主要コンポーネントがあります。
1)地上インフラ、
2)航空機側コンポーネント、
3)運用手順です。
1)地上インフラ、
2)航空機側コンポーネント、
3)運用手順です。
メッセージ生成と送信機能を含む送信サブシステム。例えば航空機など。
トランスポートプロトコル。例えばVHF(VDLモード2または4)、1090ES、978MHz UATなど。
メッセージ受信とレポート組み立て機能を含む受信サブシステム。例えば他の航空機、車両、地上システムなど。
状態ベクトルと他の送信情報のソース、およびユーザーアプリケーションは、ADS-Bシステムの一部とはみなされません。
物理層
ADS-B位置情報の中継には、2つの物理層リンク方式が使用されます。ユニバーサルアクセストランシーバーと、1090MHz拡張スキッター方式です。
ユニバーサルアクセストランシーバー(UAT)
UATはデータリンクで、主に一般航空機向けのサービスを想定しています。連邦航空局の「最終規則」では、クラスA(高度18,000フィート上空)を除くすべての空域でのUAT使用が承認されています。UATはADS-Bだけでなく、フライト情報サービス放送(FIS-B)、交通情報サービス放送(TIS-B)、将来的に必要となれば補足的な測距・測位機能もサポートする予定です。この規則で求められる一連の標準を考えると、一般航空ユーザー向けに最も効果的なアプリケーションだと見なされています。UATを搭載した「送信可能」機体は、他のADS-B In技術を使用する航空機やFAA地上局に自身を見せることができます。ADS-B In技術搭載機は、他のADS-B Out機から詳細な高度と針路ベクトル情報、およびFIS-BとTIS-Bの放送を受信できます。FIS-B放送により、受信機は気象や運航情報(AIRMET、SIGMET、METAR、SPECI、全国NEXRAD、地域NEXRAD、D-NOTAM、FDC-NOTAM、PIREP、特別使用空域の状況、ターミナルエリア予報、改訂TAF、高高度の風と温度予報など)を確認できます。これらの放送により、2020年までにこの技術を利用するインセンティブが初期導入者に提供されます。TIS-Bサービスを通じて交通情報を受信する航空機は、他機が2020年以降に装備されたときとほぼ同様に、他機を確認できます。有料サービスを必要としない気象情報サービスFIS-Bは、一般航空ユーザーにとって便利な代替手段となります。
UATシステムはADS-B運用専用に設計されています。UATは米国で「レーダーのような」管制サービスに認定された最初のリンクです。2001年以降、アラスカでは5nmの航路間隔(モザイクレーダーと同じですが、単一サイトセンサーの3nmではありません)で運用されています。UATはトゥルービダイレクショナルなADS-Bリンク規格で、地上の航空データ(FIS-B)にアクセスでき、マルチリンクゲートウェイサービスを介して近接する交通機からの報告(1090ES搭載機とレーダー追尾の非ADS-B機の報告)を受信できます。UAT搭載機は、高精度で最小限の待ち時間で互いを直接監視できます。実用的なADS-B UATネットワークが、米国の次世代航空交通システムの一部として構築されつつあります。
1090MHz拡張スキッター
2002年、連邦航空局(FAA)は、航空会社や高性能機の事業者/個人所有者向けに1090MHz拡張スキッター(1090ES)リンク、一般航空ユーザー向けにユニバーサルアクセストランシーバーリンクという、デュアルリンク決定を発表しました。2012年11月、欧州航空安全局も相互運用性の観点から、欧州連合でも1090ESを使用すると確認しました。拡張スキッターメッセージの形式はICAOによってコード化されています。
1090ESでは、既存のモードSトランスポンダー(TSO C-112、または単独の1090MHz送信機)が、拡張スキッターメッセージと呼ばれるメッセージタイプをサポートします。これは位置、速度、時刻、将来的には意図を提供する定期メッセージです。基本的な拡張スキッターには意図は含まれていません。現在の飛行管理システムにはその種のデータ(軌道変更点と呼ばれる)がないためです。航空機が拡張スキッターメッセージを送信できるようにするには、トランスポンダーの改修(TSO C-166A)が必要で、航空機の位置や他の状態情報がトランスポンダーにルーティングされます。管制地上局や交通衝突防止装置(TCAS)搭載機はすでに必要な1090MHz(モードS)受信機を備えているため、追加の拡張スキッター情報を受け入れ処理できるよう強化されます。FAAのADS-Bリンク決定と技術リンク標準に従い、1090ESではFIS-Bサービスをサポートしていません。
監視レーダーとの関係
レーダーは、地上アンテナから航空機までの距離と方位を直接測定します。一次監視レーダーは通常パルスレーダーで、高出力の無線周波数(RF)パルスを継続的に送信しています。方位は、航空機の表面から反射したRFパルスを受信したときの回転レーダーアンテナの位置で測定されます。距離は、RFエネルギーが航空機までの往復に要した時間を測定することで割り出されます。
一次監視レーダーは航空機側の協力を必要としません。監視障害の失敗モードが地上レーダーシステムに関連するものに限られる点で堅牢性があります。二次監視レーダーは航空機からのアクティブな応答に依存しています。その失敗モードには航空機搭載のトランスポンダーも含まれます。典型的なADS-B航空機搭載システムでは、航法ユニットの出力が航法と協調監視の両方に使用されるため、航空交通監視システムで対処が必要な共通の障害モードが発生します。
アンテナと航空機の距離が長くなるにつれ、放射ビームが広がり、位置情報の精度が低下します。さらに、航空機の速度変化を検出するには、数秒間隔で複数回のレーダースキャンが必要です。これに対し、ADS-Bを使うシステムでは、航空機から周期的な位置と意図のレポートを生成して送受信します。これらのレポートは航空機の航法システムに基づいて生成され、1つまたは複数のADS-Bデータリンクで配信されます。データの精度は、航空機の位置やレーダースキャンの間隔の影響を受けなくなります。ただし、地上局で受信する航空機からの信号強度は、航空機からの距離に依存し、障害物、天候などが信号の完全性を損ない、デジタルデータを誤りなく復号できなくなる可能性があります。航空機が遠くにあるほど、受信信号が弱く、上記の悪影響を受けやすくなり、誤りなく受信できる可能性が低下します。エラー検出により誤りが認識可能なので、信号を正しく受信・復号できれば、航空機の位置に関係なく完全な精度を維持できます。ただし、この利点は地上局からの航空機の距離に全く無関係というわけではありません。
現在の航空交通管制(ATC)システムは、単一のレーダーによるカバレッジに依存していません。代わりに、複数のレーダーからの情報を統合した画像が、ATCシステムの表示を通じて管制官に提示されます。これにより航空機の位置報告の質が向上し、冗長性が確保され、さまざまなレーダーの出力を相互に検証できるようになります。この検証には、ADS-Bやマルチラテレーションなど、他のテクノロジーからのセンサーデータも利用できます。